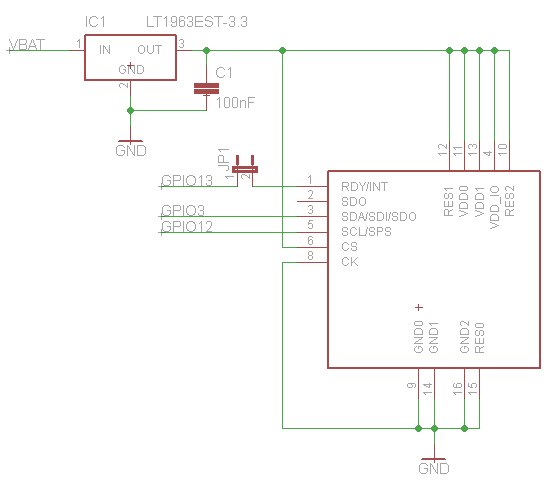
Connect accelerometer chip to GM862 tracker
To use in Python:
class LIS3LV02:
def __init__(self):
self.LIS3LV02_ADDR = 0x1D
# GPIO.setIOdir(13, 0, 0)
self.i2cbus = IIC.new(3, 12, self.LIS3LV02_ADDR)
self.Error = 0
self.Data = [0,0,0]
if (self.i2cbus.init() == -1):
print 'LIS3LV02 initialization error (1)'
self.Error = 1
elif (self.i2cbus.readwrite('\x20\x87', 0) == -1):
print 'LIS3LV02 initialization error (2)'
self.Error = 2
else:
ret = self.i2cbus.readwrite('\x0F', 1)
if (len(ret) == 1 and ord(ret[0]) == 0x3A):
self.Error = 0
else:
print 'LIS3LV02 initialization error (3) : ' + ret
self.Error = 3
def Read(self):
self.Data[0] = 0
self.Data[1] = 0
self.Data[2] = 0
if (self.Error == 0 or self.Error == 4):
ret = self.i2cbus.readwrite('\xA8', 6)
if (ret == -1):
self.Error = 4
print 'LIS3LV02 read error : %s' + ret
elif (len(ret) != 6):
self.Error = 4
print 'LIS3LV02 read error : %s' + ret
else:
self.Error = 0
for i in range(0,3):
k = ord(ret[i * 2 + 1])
k = k << 8;
k = k + ord(ret[i * 2])
if (k > 32767):
k = k - 65536
self.Data[i] = k;
return self.Data

0 comment(s) so far